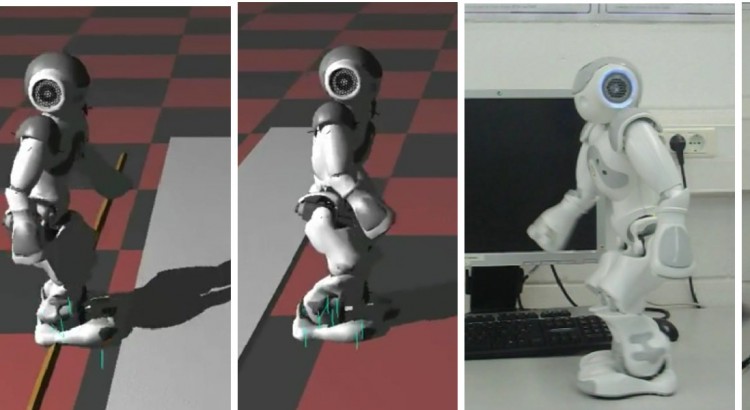
CPG-based locomotion control of biped robots Study of locomotion control systems for biped robots by using Central Pattern Generators (CPGs) networks.